Since it was first published, Flight Dynamics has offered a new approach to the science and mathematics of aircraft flight, unifying principles of aeronautics with contemporary systems analysis. Now updated and expanded, this authoritative book by award-winning aeronautics engineer Robert Stengel presents traditional material in the context of modern computational tools and multivariable methods. Special attention is devoted to models and techniques for analysis, simulation, evaluation of flying qualities, and robust control system design.
Using common notation and not assuming a strong background in aeronautics, Flight Dynamics will engage a wide variety of readers, including aircraft designers, flight test engineers, researchers, instructors, and students. It introduces principles, derivations, and equations of flight dynamics as well as methods of flight control design with frequent reference to MATLAB functions and examples. Topics include aerodynamics, propulsion, structures, flying qualities, flight control, and the atmospheric and gravitational environment.
The second edition of Flight Dynamics features up-to-date examples; a new chapter on control law design for digital fly-by-wire systems; new material on propulsion, aerodynamics of control surfaces, and aeroelastic control; many more illustrations; and text boxes that introduce general mathematical concepts.
- Features a fluid, progressive presentation that aids informal and self-directed study
- Provides a clear, consistent notation that supports understanding, from elementary to complicated concepts
- Offers a comprehensive blend of aerodynamics, dynamics, and control
- Presents a unified introduction of control system design, from basics to complex methods
- Includes links to online MATLAB software written by the author that supports the material covered in the book
Robert F. Stengel is professor emeritus of mechanical and aerospace engineering and former associate dean of engineering and applied science at Princeton University. The author of Optimal Control and Estimation, he has conducted flight research and taught graduate and undergraduate courses on aircraft flight dynamics and control for more than forty years. He was a principal designer of the Apollo Lunar Module’s manual attitude control logic, and he contributed to the design of the Space Shuttle’s guidance and control system.
- Preface to the Second Edition
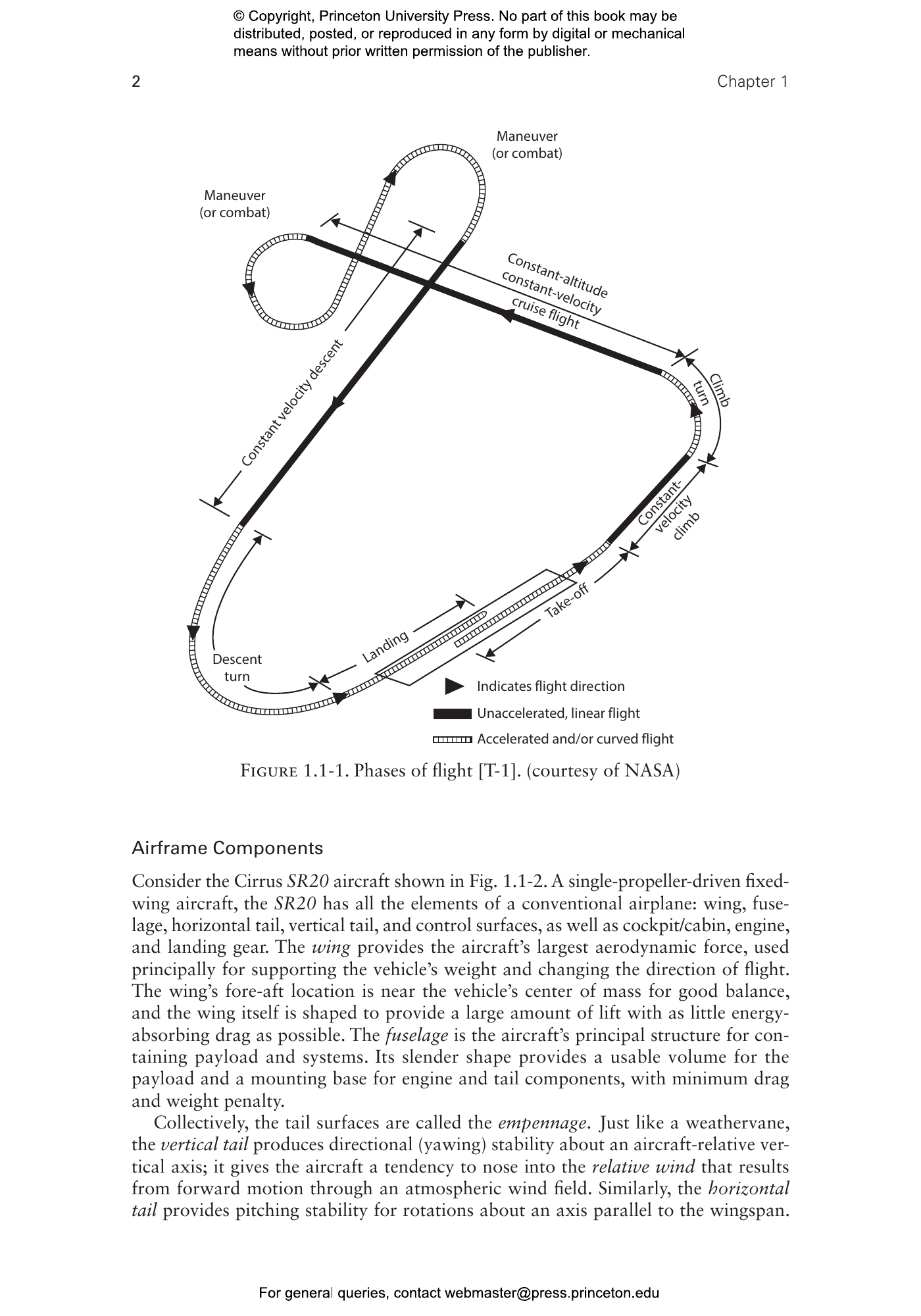
- Chapter 1 Introduction
- 1.1 ELEMENTS OF THE AIRPLANE
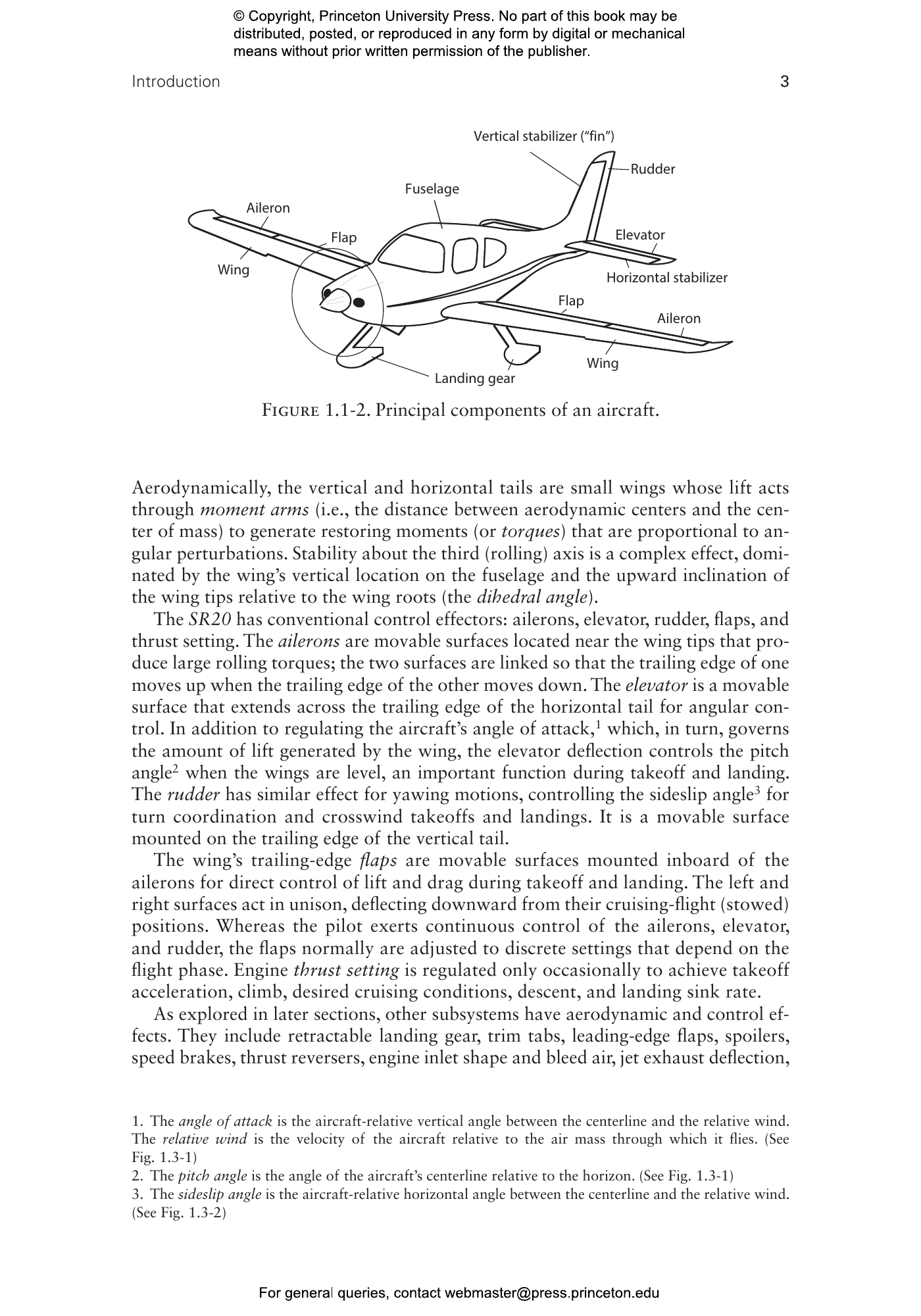
- Airframe Components
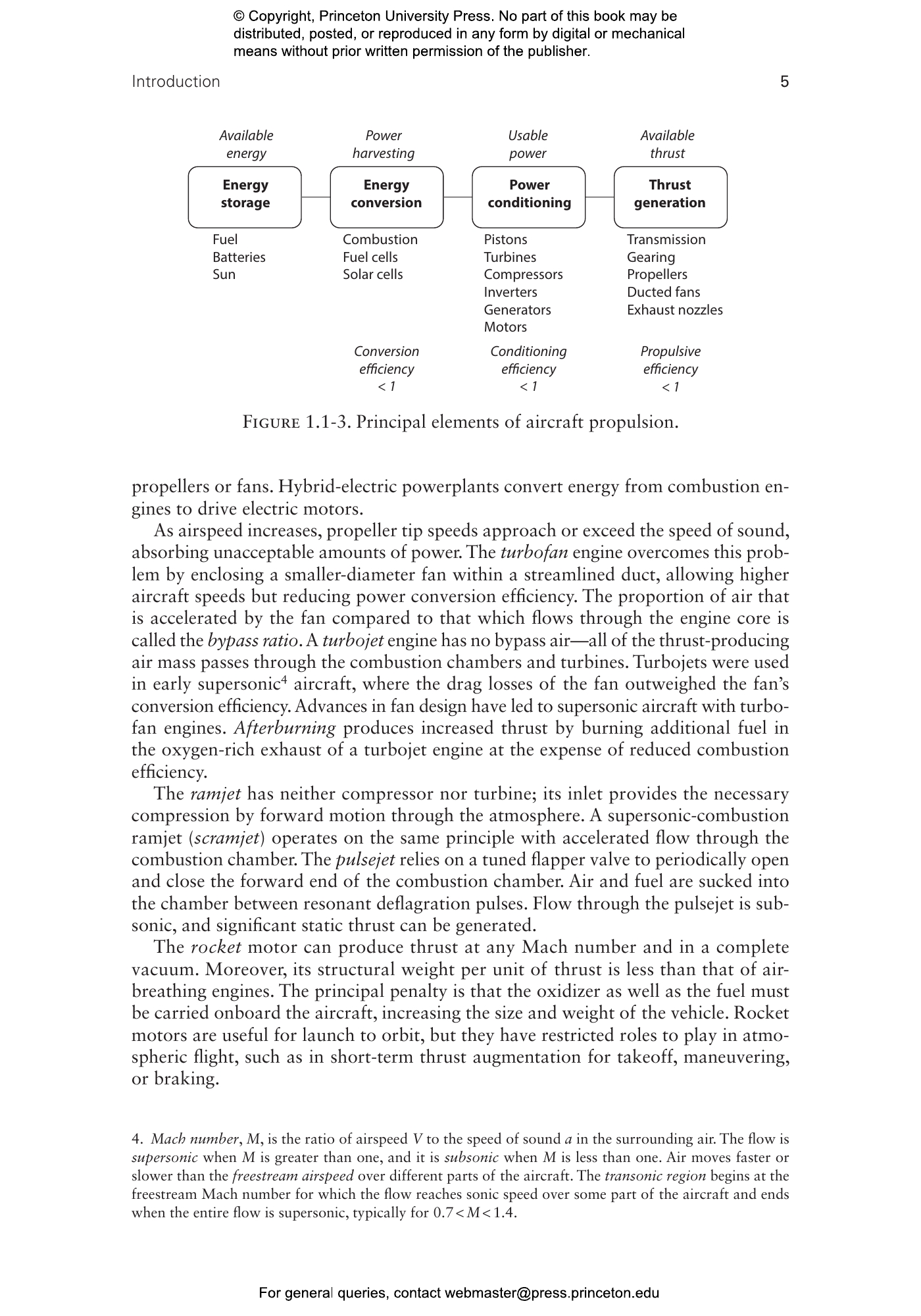
- Propulsion Systems
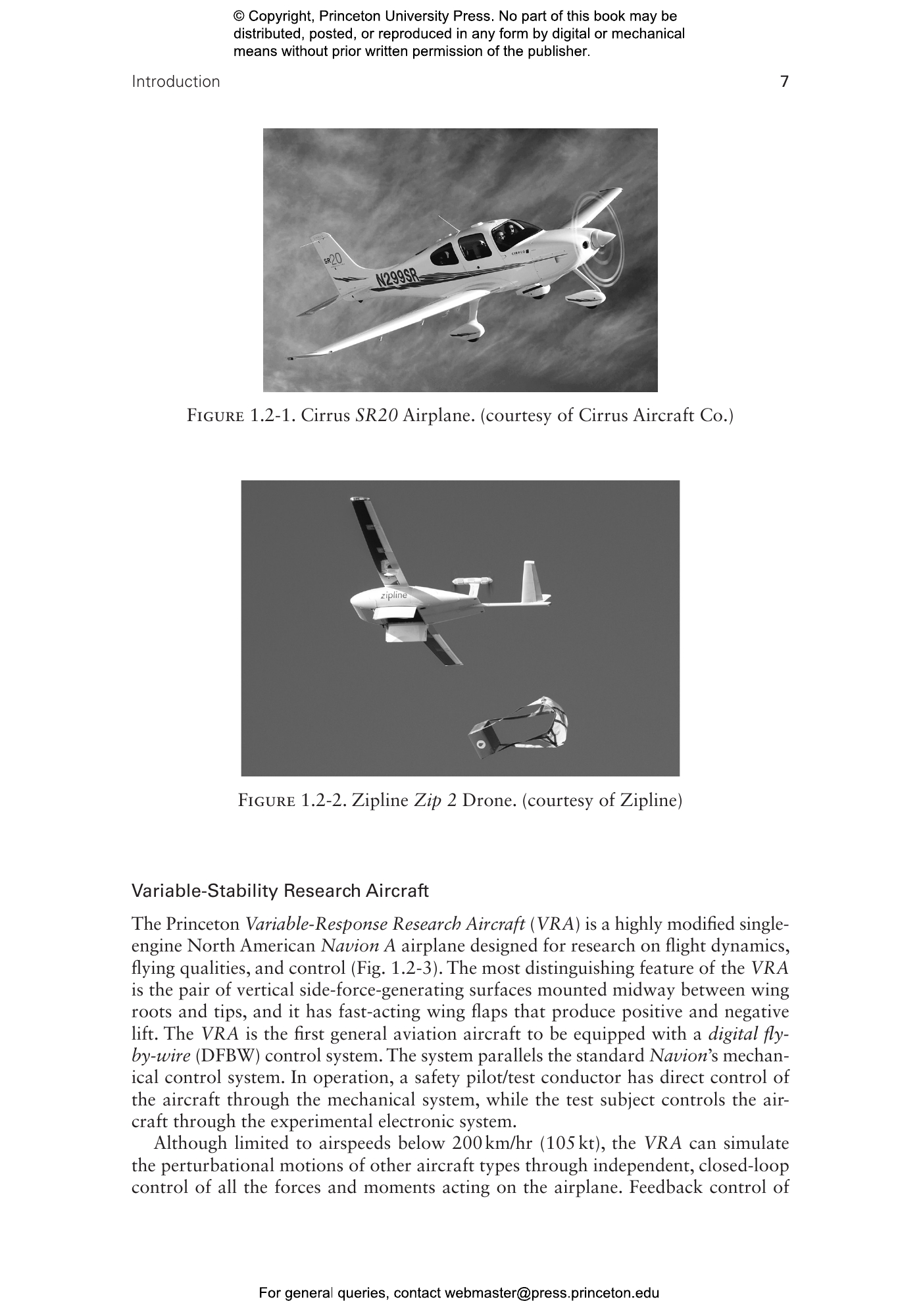
- 1.2 REPRESENTATIVE AIRCRAFT
- Light General Aviation Aircraft
- Uninhabited Air Vehicle
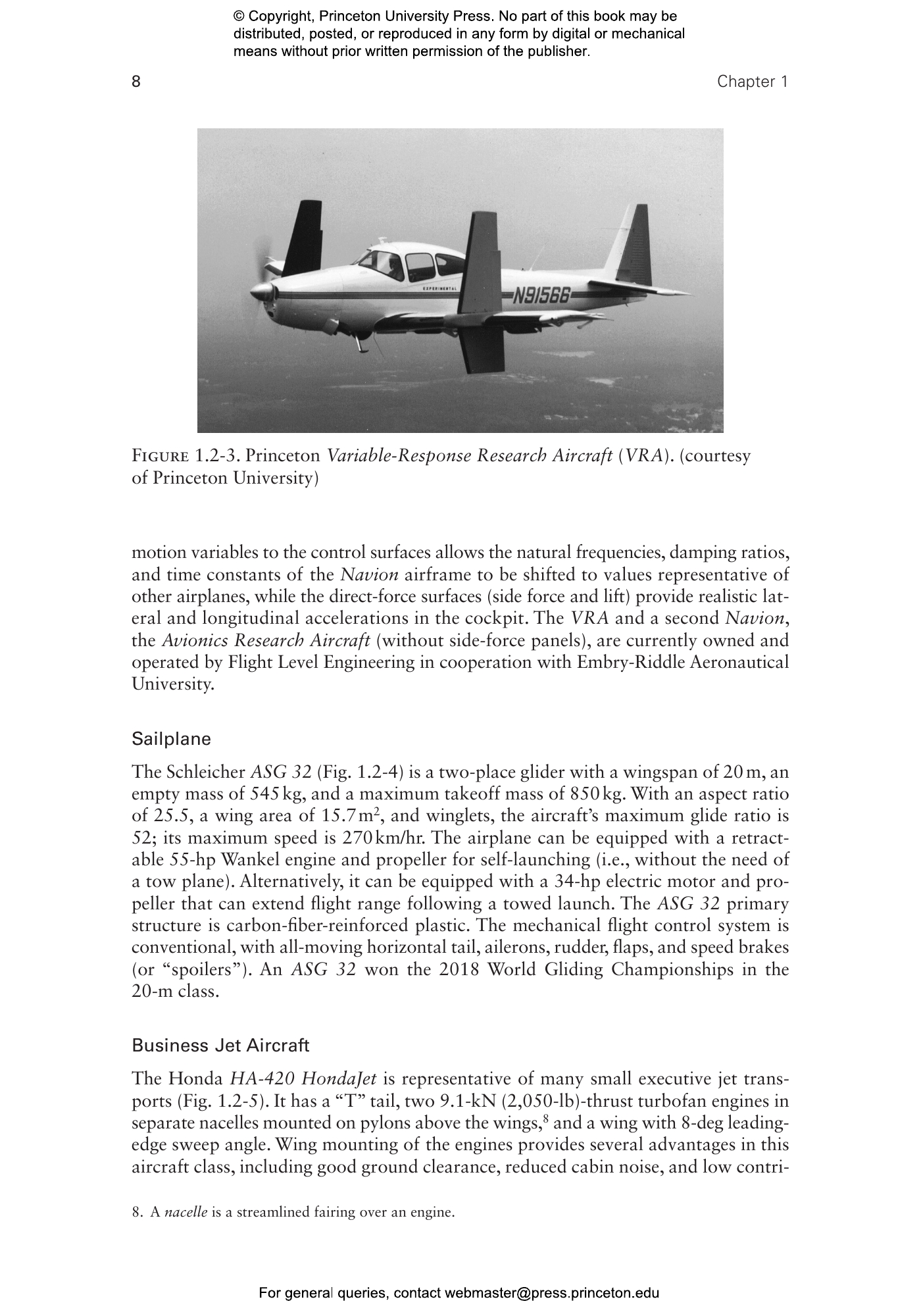
- Variable-Stability Research Aircraft
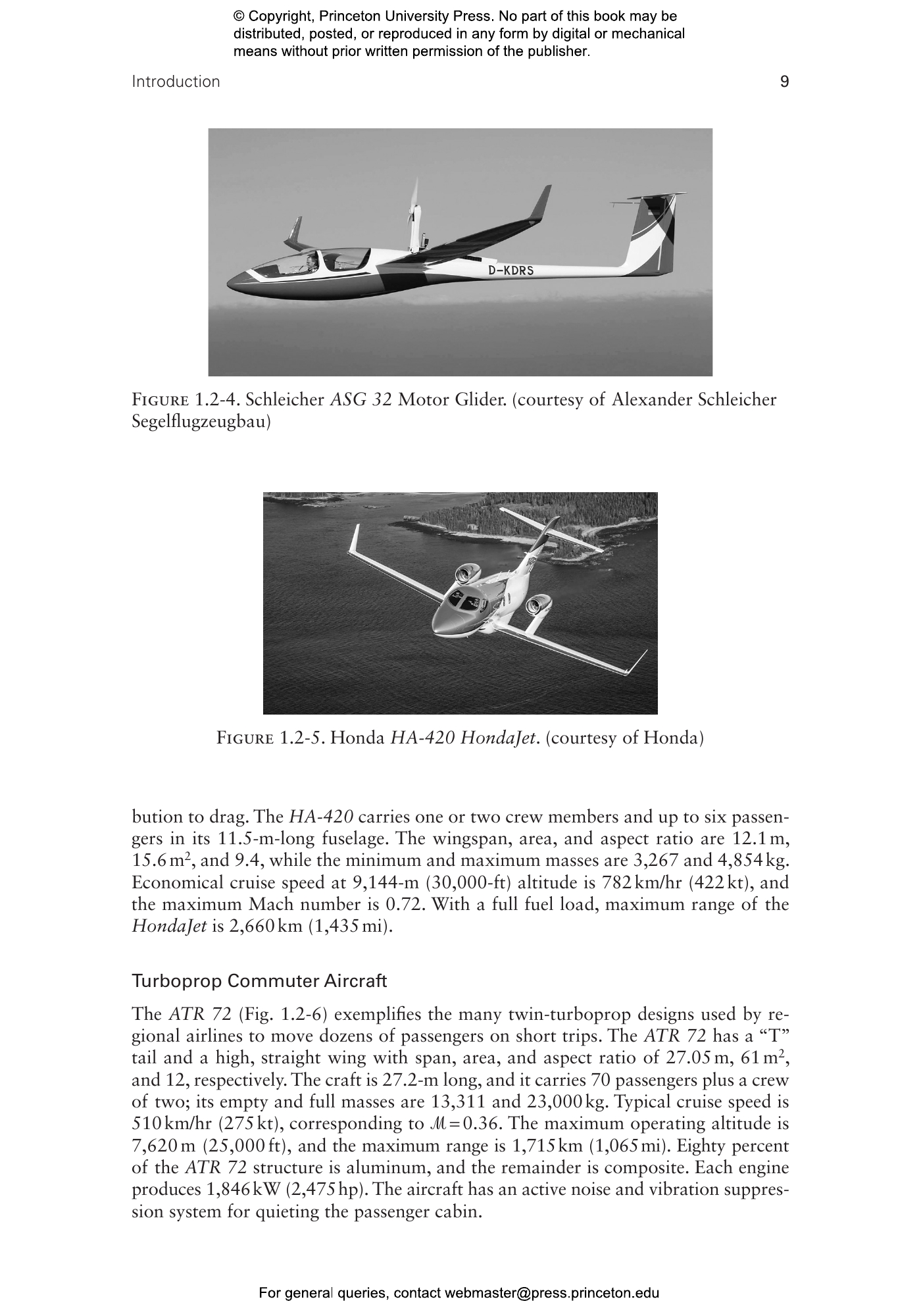
- Sailplane
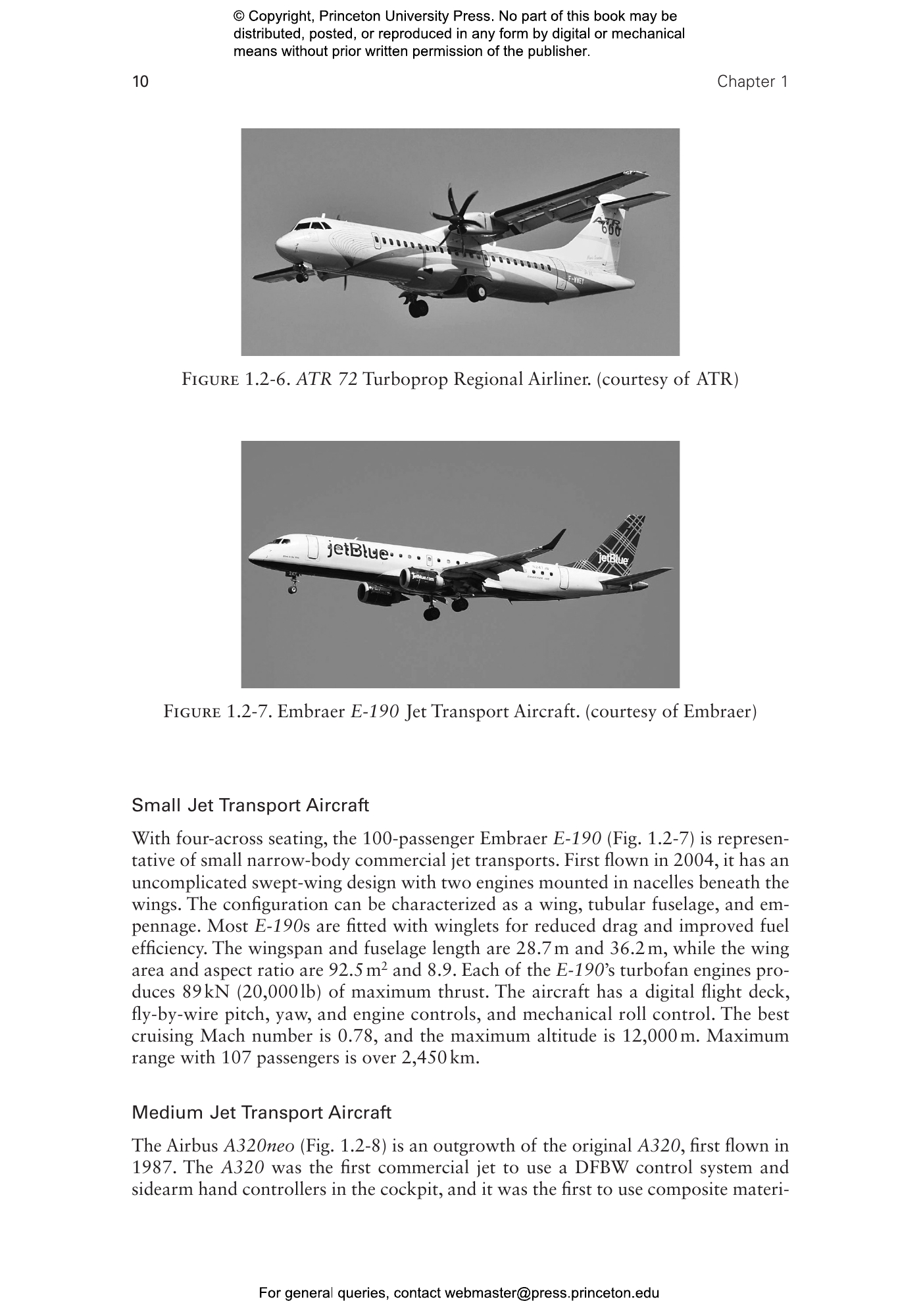
- Business Jet Aircraft
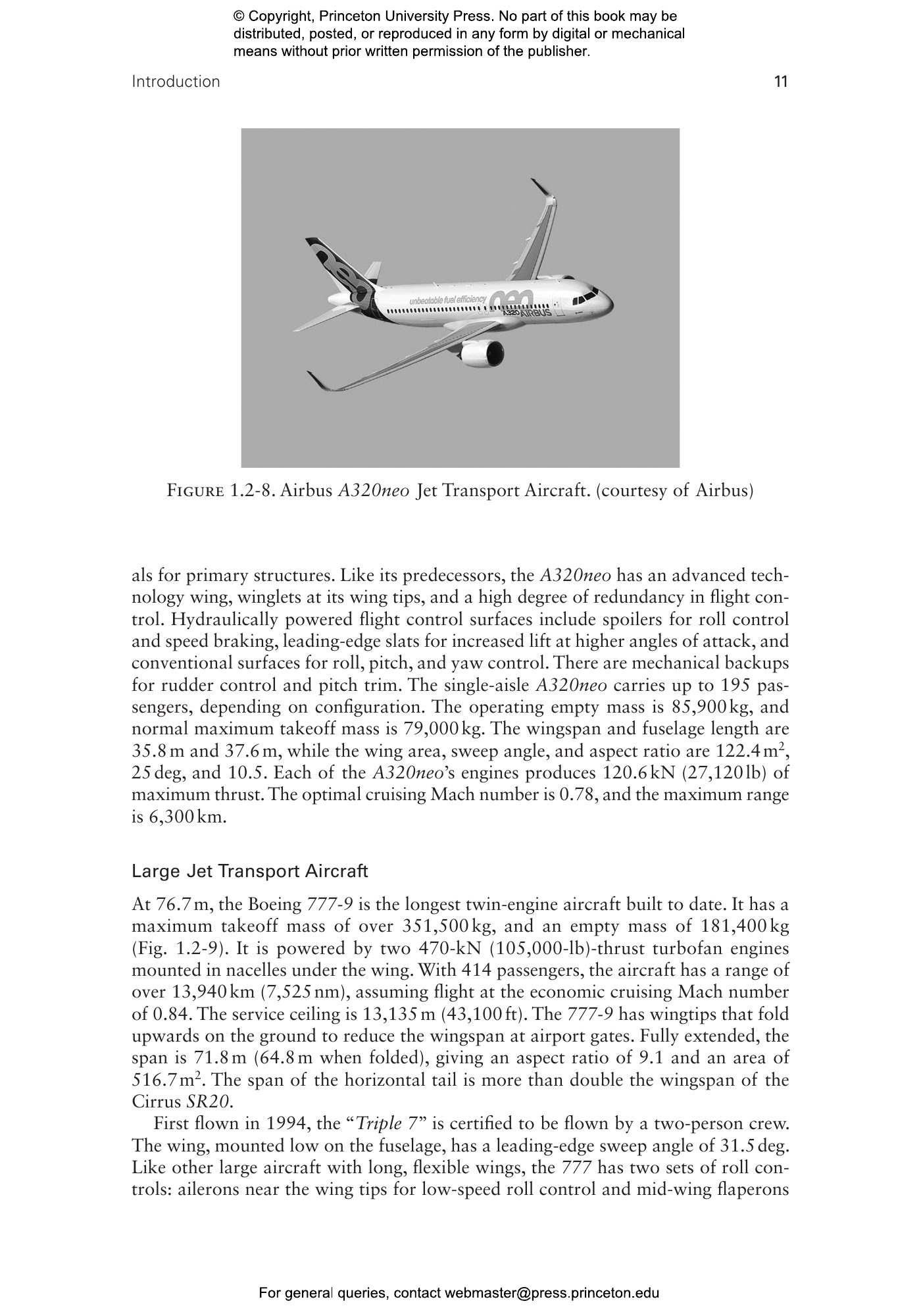
- Turboprop Commuter Aircraft
- Small Jet Transport Aircraft
- Medium Jet Transport Aircraft
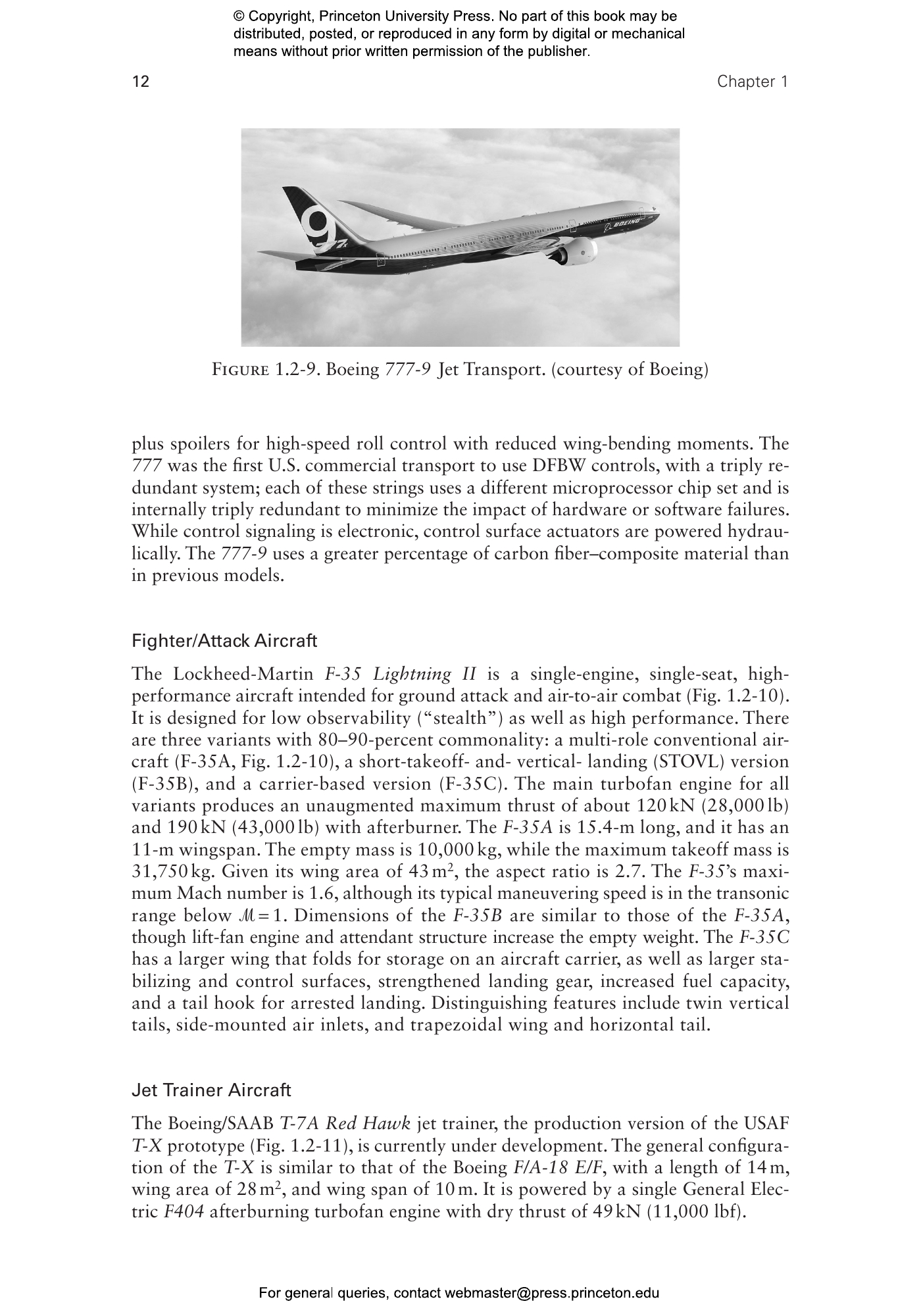
- Large Jet Transport Aircraft
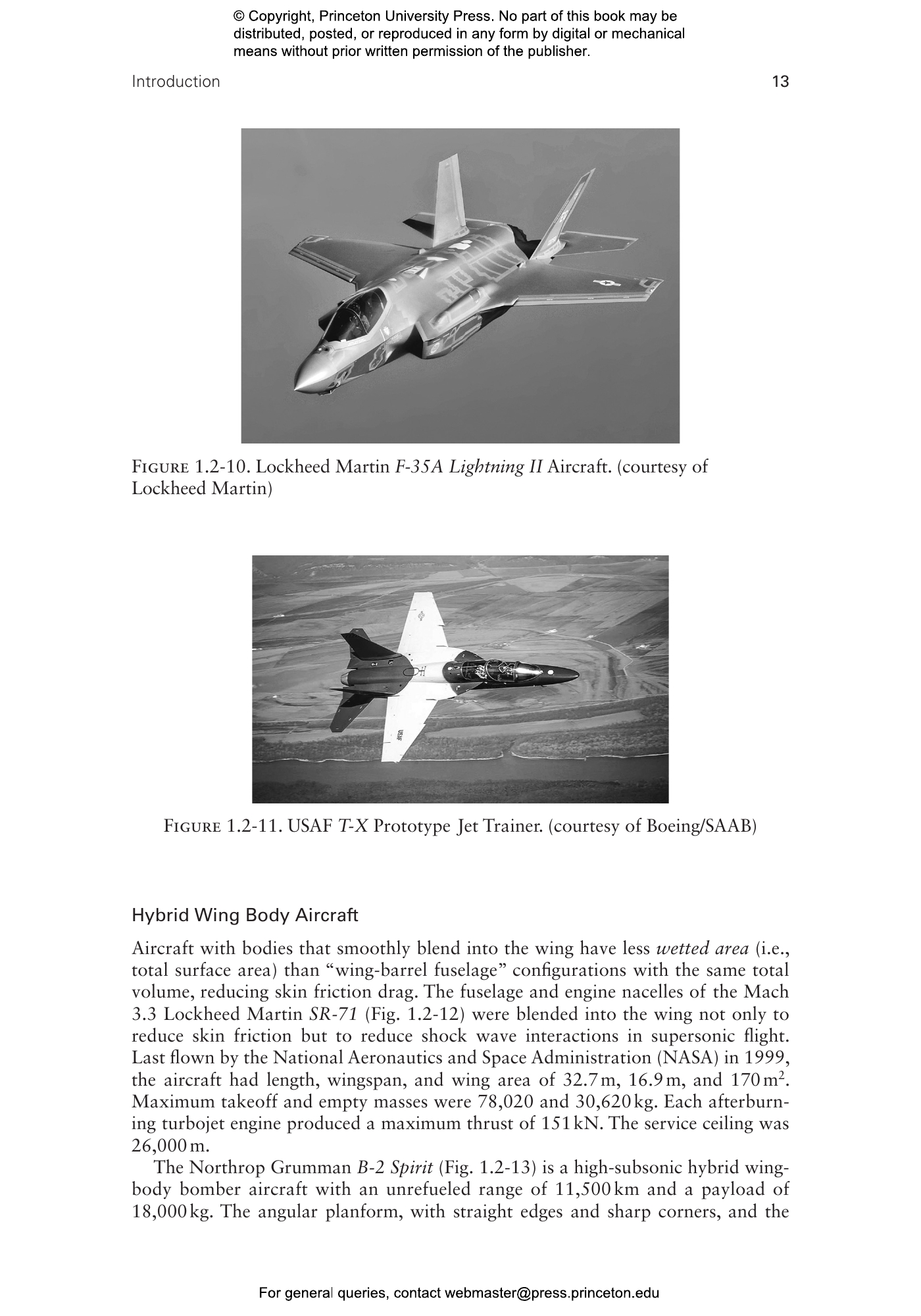
- Fighter/Attack Aircraft
- Jet Trainer Aircraft
- Hybrid Wing Body Aircraft
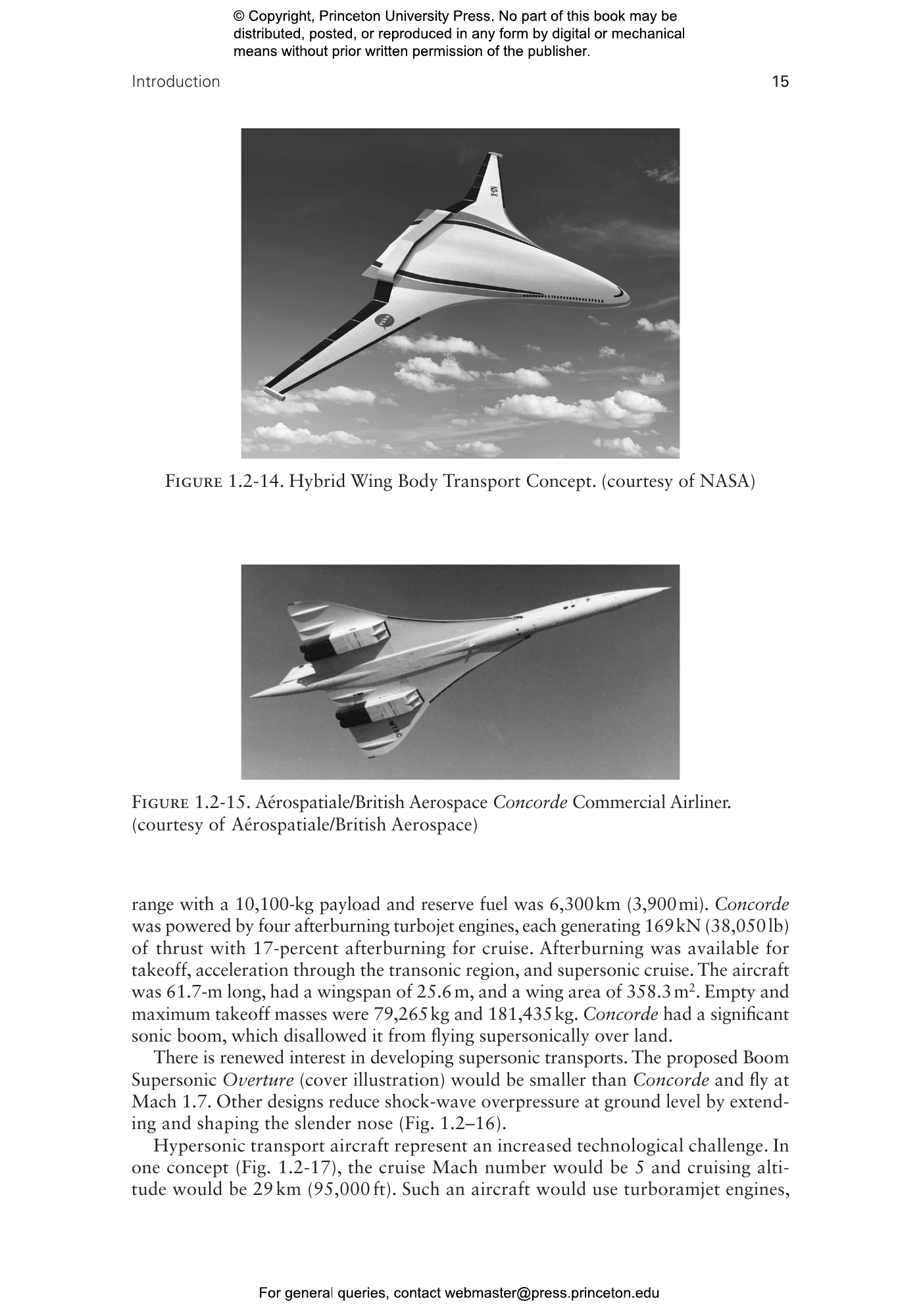
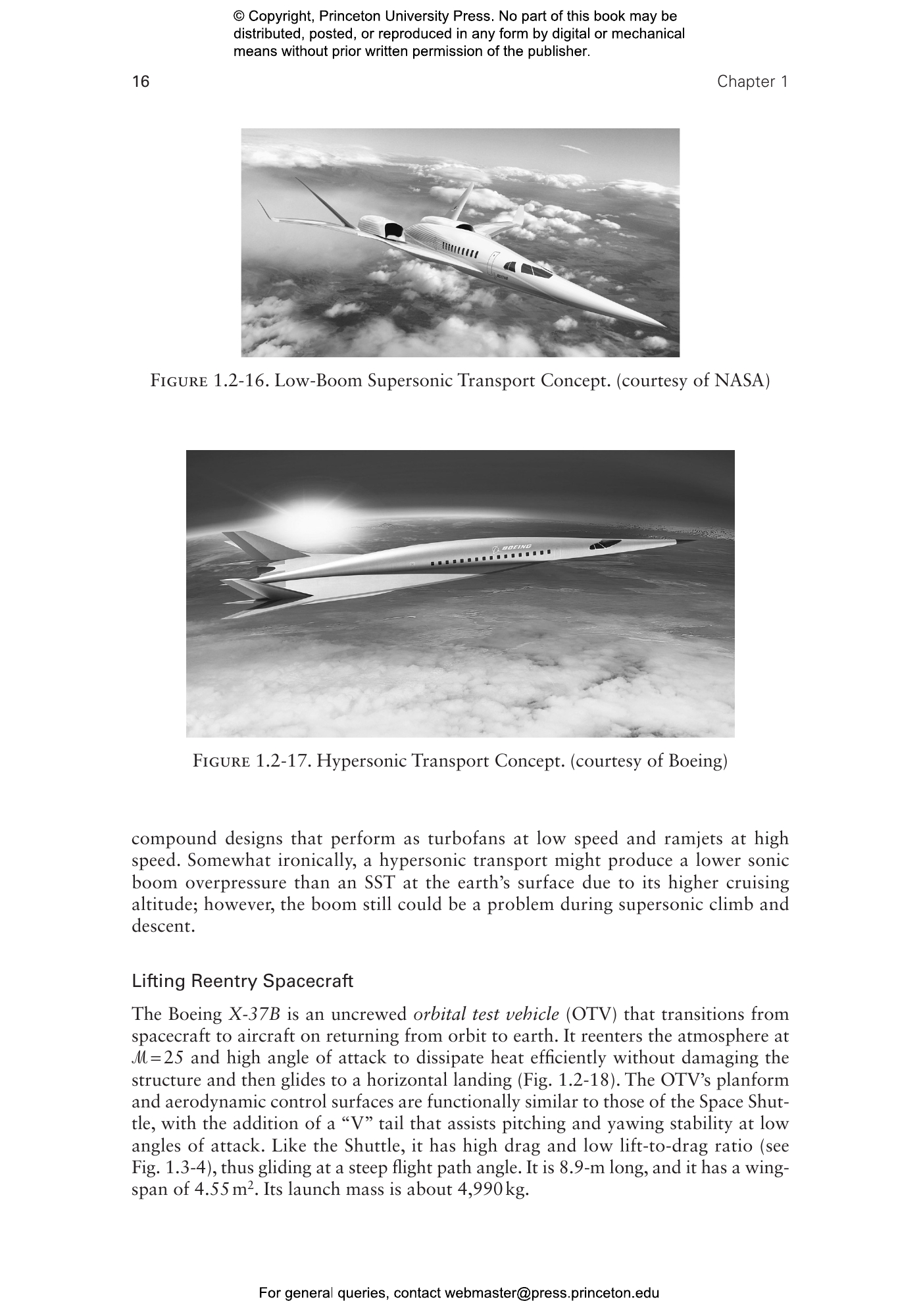
- Supersonic and Hypersonic Transport Aircraft
- Lifting Reentry Spacecraft
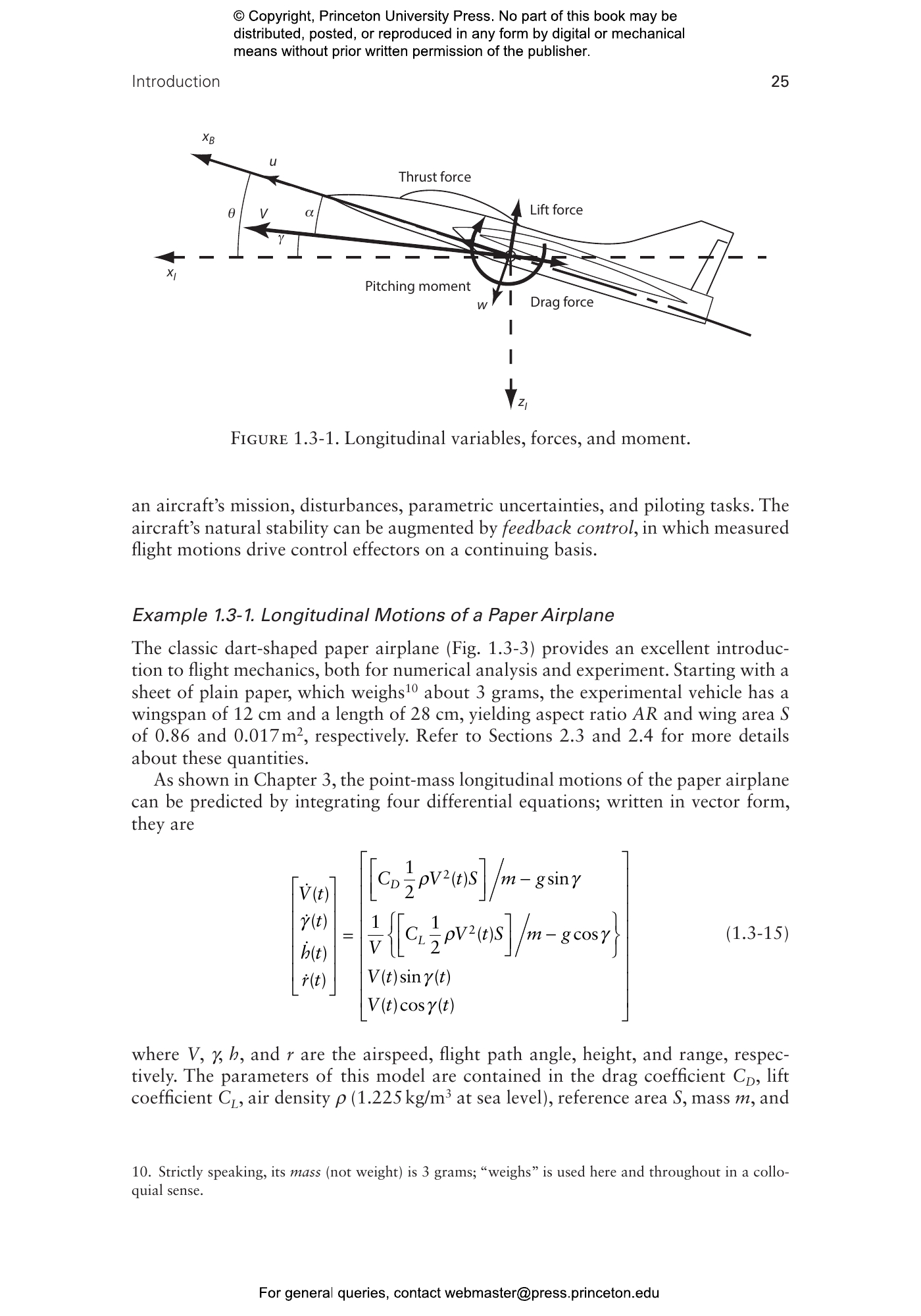
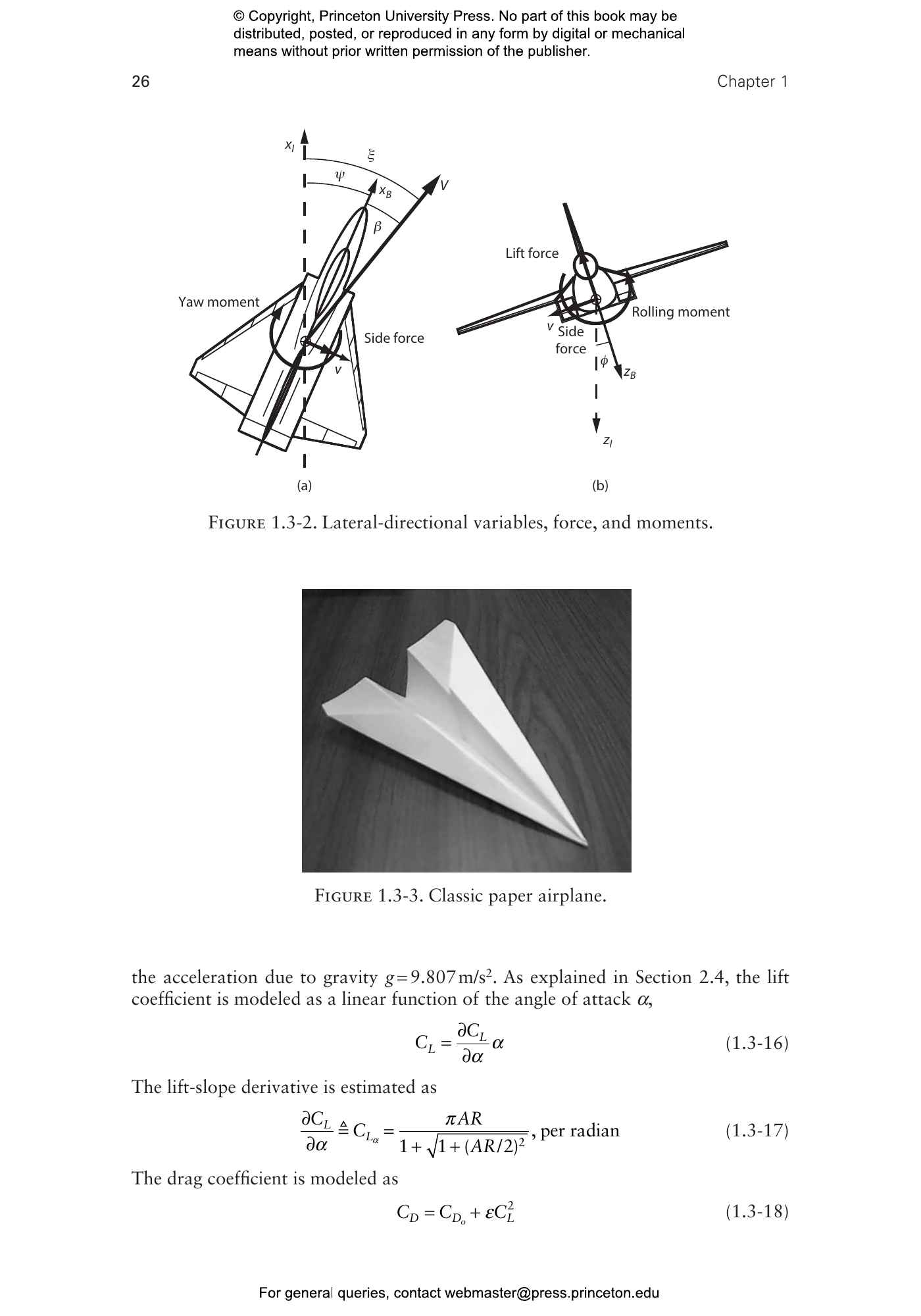
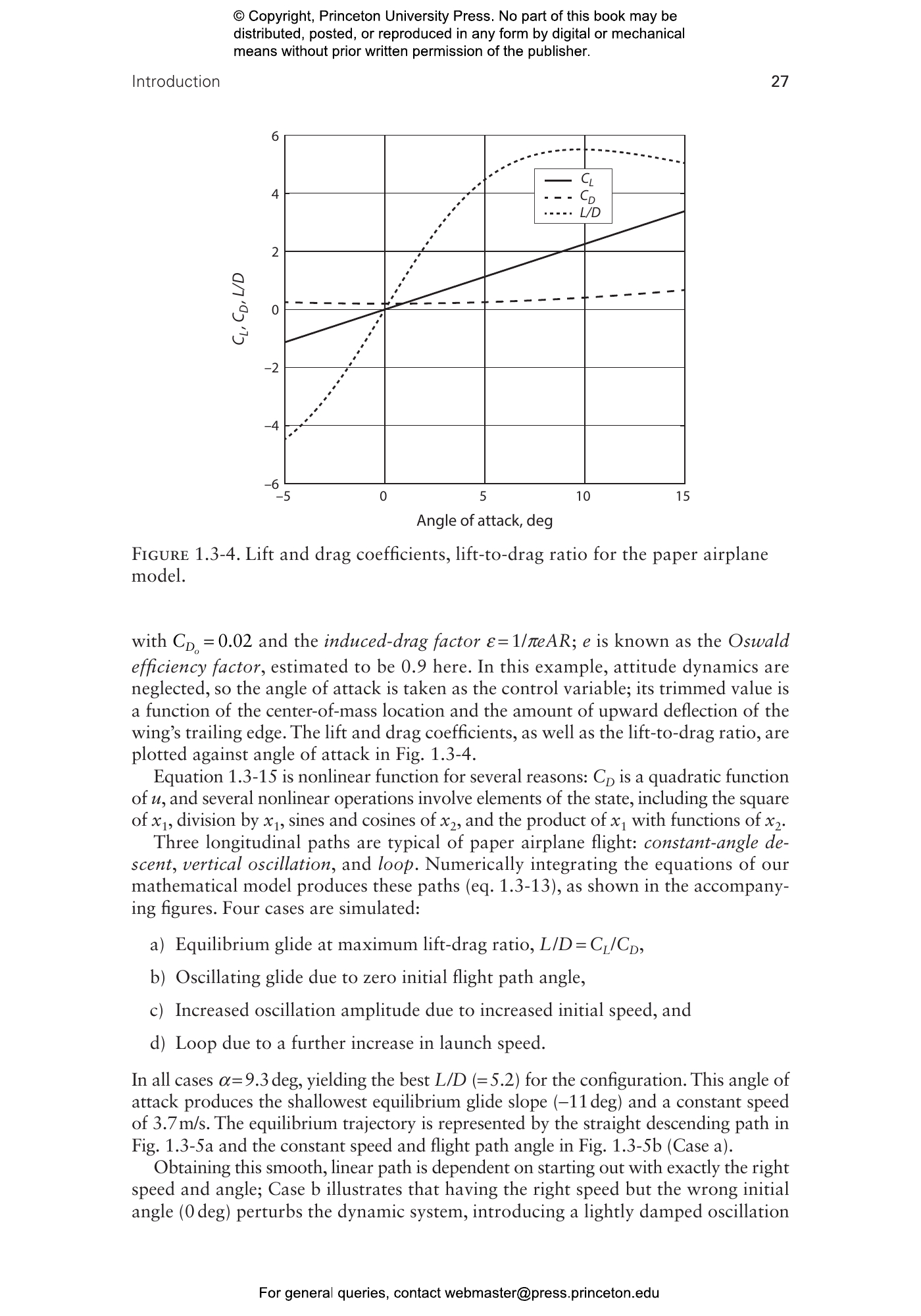
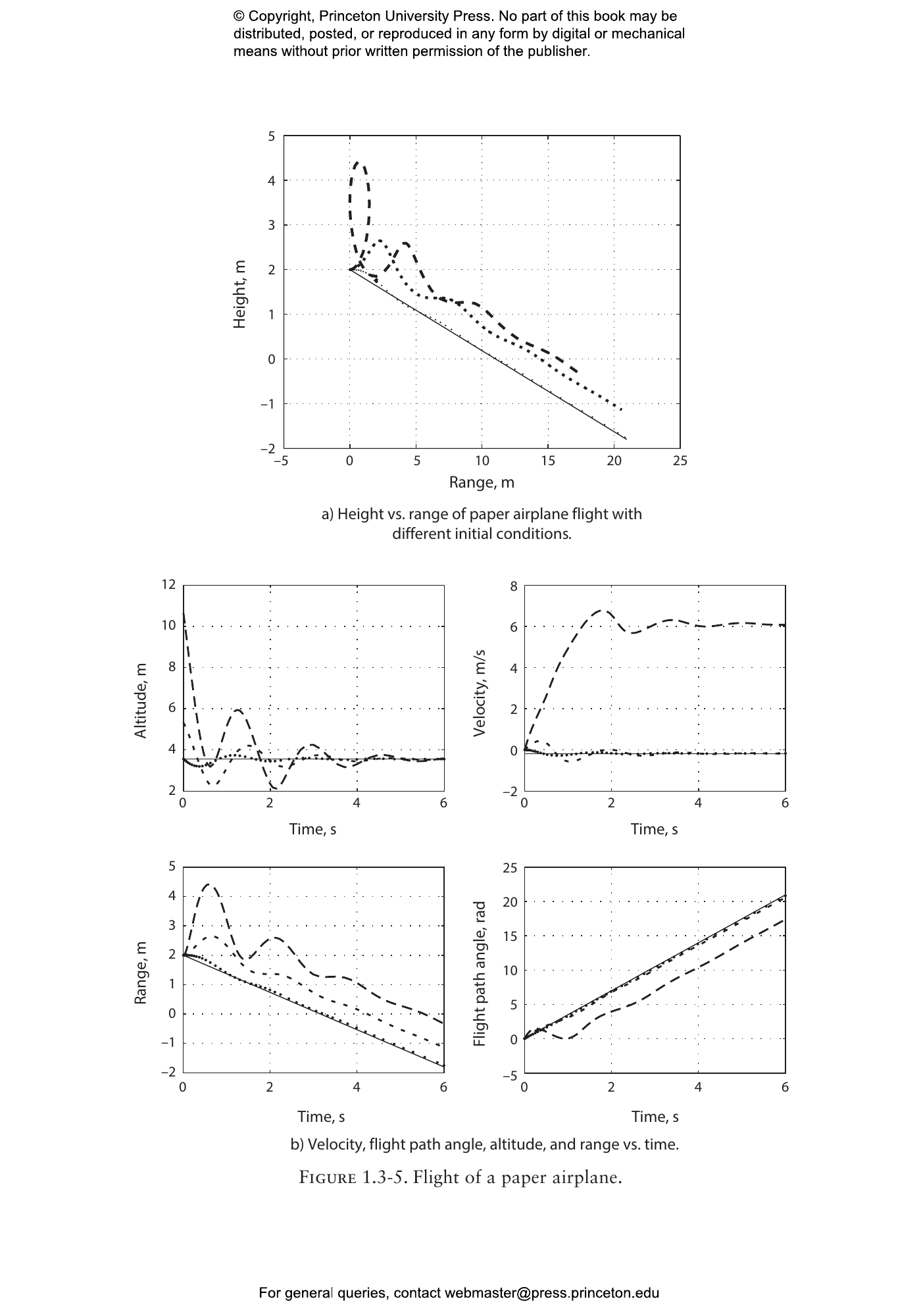
- 1.3 THE MECHANICS OF FLIGHT
- Text Box: Scalars, Vectors, and Matrices
- Text Box: Derivatives and Integrals of Time-Dependent Variables
- 1.4 COURSES IN FLIGHT DYNAMICS
- REFERENCES FOR CHAPTER 1
- Chapter 2 Exploring the Flight Envelope
- Text Box: Newton’s Laws of Motion
- 2.1 THE EARTH’S ATMOSPHERE
- Pressure, Density, and the Speed of Sound
- Viscosity, Humidity, and Rain
- Wind Fields and Atmospheric Turbulence
- 2.2 KINEMATIC EQUATIONS
- Translational Position and Velocity
- Angular Orientation and Rate
- Text Box: Matrix Inverse
- Airflow Angles
- Summary of Axis Systems and Transformations
- 2.3 FORCES AND MOMENTS
- Alternative Axis Systems
- Aerodynamic Forces and Moments
- 2.4 STATIC AERODYNAMIC COEFFICIENTS
- Lift
- Drag
- Pitching Moment
- Side Force
- Yawing Moment
- Rolling Moment
- Ground Effect
- 2.5 AIRCRAFT PROPULSION
- Power and Thrust
- Propulsion Systems
- Propellers and Ducted Fans
- Reciprocating Engines
- Turboprop, Turbofan, and Turbojet Engines
- Ramjet and Scramjet Engines
- Electric Powerplants
- General Thrust Models
- 2.6 FLIGHT PERFORMANCE
- Straight-and-Level Flight
- Steady Flight Envelope
- Cruising Range
- Gliding Flight
- Climbing Flight
- Maneuvering Envelope
- Steady Turning Flight
- Text Box: Performance of the North American P-51D Mustang
- REFERENCES FOR CHAPTER 2
- Chapter 3 The Dynamics of Aircraft Motion
- 3.1 MOMENTUM AND ENERGY
- Translational Momentum, Work, Energy, and Power
- Energy Height and Specific Excess Power
- Energy-Changing Maneuvers
- Angular Momentum and Energy
- 3.2 DYNAMIC EQUATIONS FOR A FLAT EARTH
- Rigid-Body Dynamic Equations
- Scalar Equations for a Symmetric Aircraft
- Avoiding the Euler Angle Propagation Singularity
- Direction Cosine Matrix
- Quaternion
- Alternative Reference Frames
- Air-Mass-Relative Reference Frame
- Alternative Body Frame
- Principal Axis Frame
- Text Box: Eigenvalues and Eigenvectors
- Acceleration Sensed at an Arbitrary Point
- 3.3 DYNAMIC EQUATIONS FOR A ROUND, ROTATING EARTH
- Geometry and Gravity Field of the Earth
- Rigid-Body Dynamic Equations for a Spherical Earth
- 3.4 AERODYNAMIC EFFECTS OF ROTATIONAL AND UNSTEADY MOTION
- Pitch-Rate Effects
- Angle-of-Attack-Rate Effects
- Yaw-Rate Effects
- Roll-Rate Effects
- Effects of Wind Shear and Wake Vortices
- 3.5 AERODYNAMIC EFFECTS OF CONTROL
- Trailing-Edge Flaps
- Wing-Mounted Control Surfaces
- Elevators, Stabilators, Elevons, and Canards
- Rudder
- Ailerons
- Other Control Devices
- Isolated Control Surfaces at High Deflection Angle and Angle of Attack
- 3.6 SOLUTION OF NONLINEAR DIFFERENTIAL EQUATIONS
- Numerical Algorithms for Integration
- Equations of Motion
- Continuous Representation of Tabulated Data
- Scalar Polynomials
- Multivariate Polynomials
- Computational Neural Networks
- Trimmed Solution of the Equations of Motion
- REFERENCES FOR CHAPTER 3
- Chapter 4 Methods of Analysis and Design
- 4.1 LOCAL LINEARIZATION OF DIFFERENTIAL EQUATIONS
- Stability-and-Control Derivatives
- Incorporating Unsteady Aerodynamic Effects
- Symmetric Aircraft in Wings-Level Flight
- Longitudinal Equations of Motion
- Lateral-Directional Equations of Motion
- Stability-Axis Equations of Motion
- 4.2 SOLUTION OF LINEAR DIFFERENTIAL EQUATIONS
- Numerical Integration and State Transition
- Text Box: Superposition of Linear, Time-Invariant Dynamic Responses
- Static and Quasistatic Equilibrium Response to Inputs
- Initial Response to Control Inputs
- Controllability and Observability of Motions
- Truncation and Residualization
- 4.3 STABILITY AND MODES OF MOTION
- Stability of Transient Response
- Fourier and Laplace Transforms
- Modes of Aircraft Motion
- Phase Plane
- 4.4 FREQUENCY-DOMAIN ANALYSIS
- Transfer Functions and Frequency Response
- Bode Plot
- Text Box: Bode Plot of an Isolated Zero
- Nyquist Plot and Nichols Chart
- Root Locus
- 4.5 DEALING WITH UNCERTAINTY
- Random Variables and Processes
- Text Box: Stationary and Nonstationary Probability Density Functions
- Dynamic Response to Random Inputs and Initial Conditions
- Effects of System Parameter Variations
- System Survey
- Monte Carlo Evaluation
- Stochastic Root Locus
- 4.6 LINEAR AEROELASTICITY
- Stress, Strain, and Material Properties
- Monocoque and Semi-Monocoque Structures
- Force and Moments on a Simple Beam
- Static Deflection of a Simple Beam under Load
- Vibrations of a Simple Beam
- Bending Vibrations of a Uniform Beam
- Torsional Vibrations of a Uniform Beam
- Coupled Vibrations of an Elastically Restrained Rigid Airfoil
- Vibrations of a Complex Structure
- The Four-Block Model
- Fuel Slosh
- 4.7 PILOTING ACTIONS AND AIRCRAFT FLYING QUALITIES
- Modeling the Pilot
- Flying Qualities Criteria
- Levels of Autonomy
- REFERENCES FOR CHAPTER 4
- Chapter 5 Longitudinal Motions
- 5.1 LONGITUDINAL EQUATIONS OF MOTION
- 5.2 REDUCED-ORDER MODELS OF LONG-PERIOD MODES
- Second-Order Phugoid-Mode Approximation
- Equilibrium Response to Control and Disturbance
- Controllability and Observability
- Eigenvalues, Natural Frequency, and Damping Ratio
- Eigenvectors
- Root Locus Analysis of Parameter Variations
- Frequency Response
- Root Locus Analysis of Feedback Control
- Time Response
- Effects of Compressibility
- Effects of Altitude Variation
- Air Density, Sound Speed, and Gravity Variations
- Ground Effect
- Effects of Wind Shear
- 5.3 REDUCED-ORDER MODEL OF THE SHORT-PERIOD MODE
- Second-Order Approximation
- Equilibrium Response to Control and Disturbance
- Controllability and Observability
- Eigenvalues, Natural Frequency, and Damping Ratio
- Eigenvectors
- Root Locus Analysis of Parameter Variations
- Frequency Response
- Root Locus Analysis of Feedback Control
- Time Response
- Effects of Compressibility and High Angle of Attack
- 5.4 COUPLED PHUGOID/SHORT-PERIOD DYNAMICS
- Residualized Phugoid Mode
- Fourth-Order Model
- Equilibrium Response to Control
- Eigenvalues and Root Locus Analysis of Parameter Variations
- Transfer Functions and Frequency Response
- Response to Disturbances
- Root Locus Analysis of Feedback Control
- Time Response
- Longitudinal Flying Qualities
- 5.5 CONTROL MECHANISMS, STICK-FREE STABILITY, AND TRIM
- Elevator Control Mechanism
- Short-Period/Control-Mechanism Coupling
- Control Force for Trimmed Flight
- Elevator Angle and Stick Force per g
- “Tail-Wags-Dog” Effect
- 5.6 LONGITUDINAL AEROELASTIC EFFECTS
- Truncated and Residualized Aeroelastic Models
- Coupling of the Short Period with a Single Elastic Mode
- Equilibrium Response to Control
- Eigenvalues and Root Locus Evaluation of Parameter Variations
- Control and Disturbance Transfer Functions
- Frequency Response and the Effects of Feedback Control
- Effects of Elasticity on Time Response
- REFERENCES FOR CHAPTER 5
- Chapter 6 Lateral-Directional Motions
- 6.1 LATERAL-DIRECTIONAL EQUATIONS OF MOTION
- 6.2 REDUCED-ORDER MODEL OF THE DUTCH ROLL MODE
- Equilbrium Response to Control and Disturbance
- Controllability and Observability
- Eigenvalues, Natrual Frequency, and Damping Ratio
- Eigenvectors
- Root Locus Analysis of Parameter Variations
- Frequency Response
- Root Locus Analysis of Feedback Control
- Time Response
- 6.3 REDUCED-ORDER MODEL OF ROLL AND SPIRAL MODES
- Equilbrium Response to Control and Disturbance
- Controllability and Observability
- Eigenvalues, Natural Frequency, and Damping Ratio
- Eigenvectors
- Root Locus Analysis of Parameter Variations
- Frequency Response
- Root Locus Analysis of Feedback Control
- Time Response
- 6.4 COUPLED LATERAL-DIRECTIONAL DYNAMICS
- A Truncated Dutch Roll/Roll Model
- Residualized Lateral-Directional Models
- Residualized Dutch Roll Mode
- Residualized Dutch Roll and Spiral Modes
- Residualized Roll-Spiral Modes
- Fourth-Order Model
- Equilibrium Response to Control
- Eigenvalues and Root Locus Analysis of Parameter Variations
- Eigenvectors
- Transfer Functions and Frequency Response
- Response to Disturbances
- Root Locus Analysis of Feedback Control
- Time Response
- Lateral-Directional Flying Qualities
- Flying Qualities Criteria
- 6.5 CONTROL MECHANISMS, NONLINEARITY, AND TIME DELAY
- Rudder Control Mechanism
- Dutch Roll/Rudder Coupling
- Quasilinear Representation of Nonlinearity
- Quasilinear Root Locus Analysis
- Roll-Spiral/Aileron Coupling
- Spoiler Nonlinearity and Time Delay
- 6.6 LATERAL-DIRECTIONAL AEROELASTIC EFFECTS
- Equilibrium Response to Control
- Eigenvalues and Root Locus Analysis of Parameter Variations
- Response to Initial Conditions and Step Control Inputs
- Directional Fuselage Bending Forced by Sideslip Perturbations
- Asymmetric Wing Twisting Forced by Sideslip Perturbations
- Asymmetric Wing Twisting Forced by Roll-Rate Perturbations
- REFERENCES FOR CHAPTER 6
- Chapter 7 Coupled Longitudinal and Lateral-Directional Motions
- 7.1 SMALL-AMPLITUDE MOTIONS
- Effects of Rotating Machinery
- Asymmetric Inertial and Aerodynamic Properties
- Asymmetric Flight Condition and Constant Angular Rate
- Nonzero Sideslip Angle
- Nonzero Roll Angle
- Nonzero Angular Rate
- Coupling Controls
- 7.2 INERTIAL COUPLING OF PITCH AND YAW MOTIONS
- Fifth-Order Model of Coupled Dynamics
- Truncated and Residualized Fourth-Order Models
- Response to Controls during Steady Rolling
- 7.3 MULTIPLE EQUILIBRIUM POINTS
- Second-Order Examples of Multiple Equilibria
- Cubic-Spring Effect
- Cubic-Damper Effect
- Effects of Cross-Coupling and Control on Rolling Equilibrium
- Description of the Phenomenon
- Characterization of Solutions
- Bifurcation Analysis
- 7.4 FLIGHT AT HIGH ANGLE OF ATTACK
- High-Angle-of-Attack Aerodynamics and Control Effects
- Fully Developed Spins
- Simulated Motions of a Business Jet Aircraft
- Stability of High-Angle-of-Attack Maneuvers
- Pilot-Aircraft Interactions at High Angle of Attack
- REFERENCES FOR CHAPTER 7
- Chapter 8 Flight Control Design
- The Evolution of Flight Control
- Flight Control Modes and Redundancy
- Overview
- 8.1 OPEN- AND CLOSED-LOOP COMMAND RESPONSE
- Equilibrium Open-Loop Response
- Equilibrium Closed-Loop Response
- Text Box: Digital Flight Control
- 8.2 LINEAR-QUADRATIC OPTIMAL CONTROL
- Linear-Quadratic Regulator
- Text Box: Criteria for Guaranteed Stability of the Linear-Quadratic Regulator
- LQ Regulators for a Longitudinal Dynamic Model
- LQ Regulators for a Lateral-Directional Dynamic Model
- Pre-Filtered Command Inputs to the LQ Regulator
- Transient Commands to the LQ Regulator
- Output Weighting and Implicit Model Following
- Explicit Model Following
- Integral Compensation
- Proportional-Integral LQ Regulator
- Proportional-Filter LQ Regulator
- Washout Filter
- Text Box: Sampled-Data LQ Regulator
- 8.3 OPTIMAL STATE ESTIMATION
- Kalman-Bucy Filter
- Text Box: Discrete-Time Kalman Filter
- Extended Kalman Filter
- Parameter Estimation
- Measurement Bias and Covariance Estimation
- Disturbance Bias and Covariance Estimation
- 8.4 LINEAR-QUADRATIC-GAUSSIAN OPTIMAL CONTROL
- LQG Regulator
- Dealing with Aeroelasticity
- Text Box: Sampled-Data LQG Control
- 8.5 CONTROL SYSTEM ROBUSTNESS
- Modal Properties of the LQ Regulator
- Stability Margins and Robustness of LQ Regulators
- Stochastic Robustness Analysis and Design
- Stability Margins and Robustness of LQG Regulators
- 8.6 GAIN-SCHEDULED AND NEURAL NETWORK CONTROL
- Gain Scheduling
- Neural Network Control
- 8.7 NONLINEAR-INVERSE-DYNAMIC CONTROL
- Lie Derivatives
- Inverting a Linear, Time-Invariant System
- Relative Degree of Differentiation
- 8.8 ADAPTIVE AND FAILURE-TOLERANT CONTROL
- Machine Learning and Adaptive Critic Control
- Action Network
- Critic Network
- Parameter-Adaptive LQG Control
- Multiple-Model Parameter Estimation
- Failure Detection, Identification, and Reconfiguration
- Failure Detection and Diagnosis
- Failure Identification
- Text Box: Entropy and Mutual Information
- Control Law Reconfiguration
- REFERENCES FOR CHAPTER 8
- Chapter 9 Epilogue
- Appendix A Constants, Units, and Conversion Factors
- Appendix B Nonlinear Six-Degree-of-Freedom Aircraft Flight Simulation
- B.1 MAIN PROGRAM FOR ANALYSIS AND SIMULATION (FLIGHT.M)
- B.2 MATHEMATICAL MODEL OF THE AIRCRAFT (AEROMODEL.M)
- B.2.1 Low-Angle-of-Attack, Mach-Dependent Model (AeroModelMach.m)
- B.2.2 High-Angle-of-Attack, Low-Subsonic Model (AeroModelAlpha.m)
- B.2.3 User-Defined Model (AeroModelUser.m)
- B.2.4 Preliminary Modeling for Dynamic Analysis (ModelBuild.m)
- B.3 SUPPORTING FUNCTIONS
- B.3.1 Equations of Motion (EoM.m, EoMQ.m)
- B.3.2 Cost Function for Aerodynamic Trim (TrimCost.m)
- B.3.3 Rotation Matrices (DCM.m and RMQ.m)
- B.3.4 Linear System Matrices (LinModel.m)
- B.3.5 Wind Field (WindField.m)
- B.3.6 Atmospheric State (Atmos.m)
- REFERENCES FOR APPENDIX B
- Appendix C Linear System Analysis and Control System Design
- C.1 MAIN PROGRAM FOR LINEAR ANALYSIS AND SIMULATION (SURVEY.M)
- C.2 ANALYSES AND FUNCTIONS FOR SYSTEM ANALYSIS
- C.2.1 Reduced-Order Models (LonLatDir.m)
- C.2.2 Natural Frequency (NatFreq.m)
- C.2.3 Eigenvalues and Eigenvectors (StabMode.m)
- C.2.4 Initial-Condition Response
- C.2.5 Response to Control Step Input
- C.2.6 Response to Control Time Profile
- C.2.7 Equilibrium Response to Constant Control Perturbation
- C.2.8 Controllability and Observability
- C.2.9 Transfer Functions
- C.2.10 Human-Pilot Transfer Function
- C.2.11 Stability Margins
- C.2.12 Bode Plots
- C.2.13 Nyquist Plots
- C.2.14 Nichols Charts
- C.2.15 Root Locus Plots
- C.3 MAIN PROGRAM FOR LINEAR-QUADRATIC CONTROL LAW DESIGN (LQDESIGN.M)
- C.4 ANALYSES AND FUNCTIONS FOR CONTROL LAW DESIGN
- C.4.1 Command and Control Effector Selection (LatDirOL.m and LonOL.m)
- C.4.2 Linear-Quadratic Control Law (LQControl.m)
- C.4.3 Time Response Plots (LQPlot.m)
- C.4.4 Control System Robustness (Robust.m)
- Appendix D Paper Airplane Simulation
- Appendix E Exercises
- Index
- av������ the Author
"[A] tour de force of a text. . . . An ambitious and important work. . . . [It] brings the material up to the minute, tackles more topics with more depth, buttresses its analysis with MATLAB examples, and still does a superb job of stimulating and informing the reader. . . . Its push toward computational synthesis does open a new door for this type of text."—John Hodgkinson, AIAA Journal
"This book provides a significant addition to the existing literature on flight mechanics. It deserves to be part of the library of scholars and practicing flight mechanics engineers alike."—Eric Feron, IEEE Control Systems
"This book is definitely a significant contribution to the field. It is more comprehensive than any other work on flight dynamics I have seen; it includes newer concepts, such as neural nets and wind shear effects, some of these reflecting the author's own research; and it gives a very broad view of flight dynamics. Not only is it a fine textbook on flight dynamics, but it is so thorough and so well written that it will undoubtedly catch the attention of practicing engineers and airplane enthusiasts."—Haim Baruh, Rutgers University